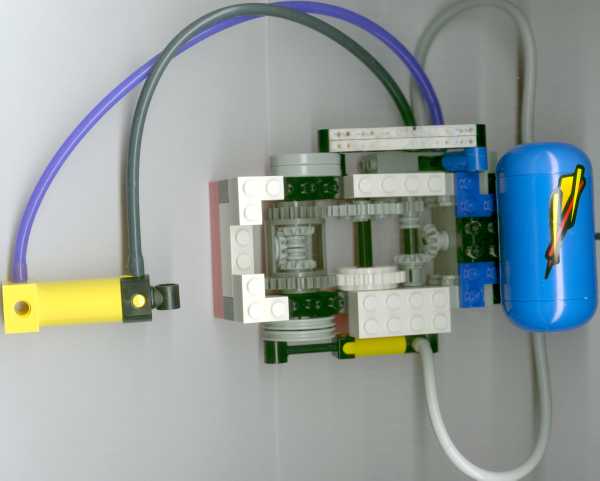
Do you need pneumatics on your robot? You want to produce the pressure and you want to switch the valve by motors. With my idea you can do both with a single motor. This can be easily controlled by RCX or manually.
This is the 1st version which may be nice for mobile robots. For stationary use please check the 2nd version.
CAUTION: You should not run the motor all the time without consuming pressure. This could damage motor, pump and gearing.
Have a look at the details.
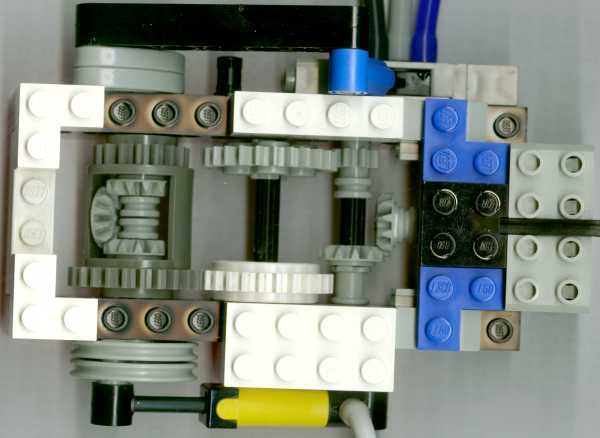
The trick is the differential gearing.
Once some pressure has been build up, the resistance of
the compressor forces the lever of the valve.
Depending on which direction the motor turns, the valve
will be switched into the one or the other position.
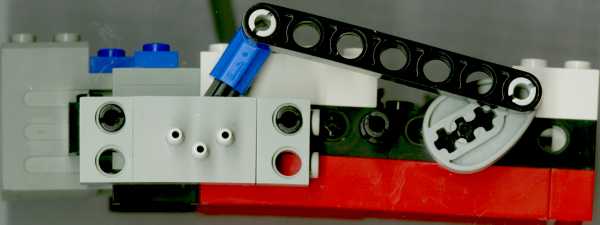
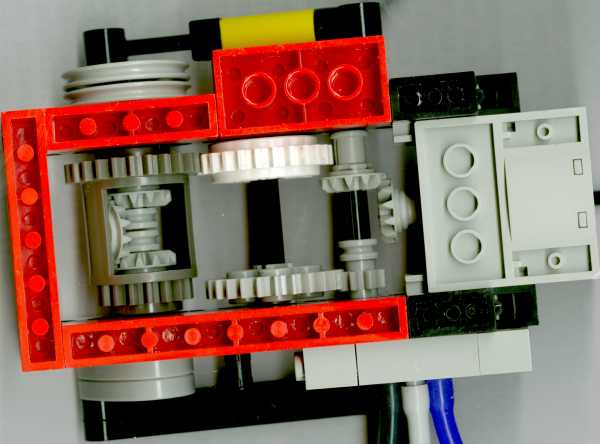
You can turn round the axis with the small gear on it
(the first axis to the motor). Depending on this the force is limited by
the friction of the white slip gear or not. If you don't limit the force
you can reach more pressure. But take care of your motor.

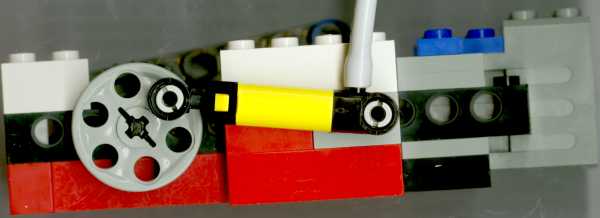
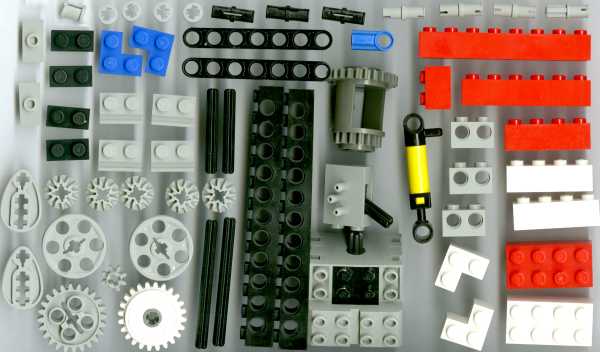
This is what you need.
Have a lot of fun.